
[java 스터디 1주차] java 힙(heap)과 다익스트라 알고리즘 개념
힙(Heap)
힙은 완전 이진트리 형태로 최대, 최솟값을 빠르게 찾아내는데 유용한 자료구조이다.
- 힙은 중복값을 허용한다.
- 부모-자식 간 (레벨 별) 정렬은 보장하고, 형제간의 정렬은 보장하지 않아서 반 정렬 상태라고 볼 수 있다.
힙은 최소 힙(Min Heap), 최대힙(Max Heap) 두가지가 있다.
- 최소 힙은 루트노드가 최솟값이 되고, 부모노드의 key는 자식노드의 key보다 작아야 한다는 규칙이 있다.
- 최대 힙은 루트노드가 최댓값이 되고, 부모노드의 key가 자식 노드의 key보다 커야 한다는 규칙이 있다.
최소 힙(Min Heap)
최소 힙(Min Heap)은 부모 노드의 key가 자식 노드의 key보다 작거나 같은 완전 이진트리이다.
- 다른 규칙은 없다. 단지 부모노드가 자식 노드의 key보다 작기만 하면 된다.

최소 힙의 삽입 과정
트리의 가장 끝 위치에 데이터를 삽입하고,
부모노드와 key값을 비교하여 작을 경우 부모 노드와 자리를 교체하는 것을 반복한다.
최소 힙의 삭제 과정
- 힙은 삭제할 때 최상위 노드를 반환하며 삭제한다. 마치 Queue의 poll()와 같다.
최상위 노드를 삭제한 후 최상위 노드에 가장 마지막 위치의 노드를 위치시킨다.
그 후, 삽입과 반대의 과정으로 자식노드와 비교하며 자리를 교체한다.
(좌, 우 노드와 비교하여 더 작은 값과 자리를 교체한다.)
최대 힙(Max Heap)
최대 힙(Max Heap)은 부모 노드의 key가 자식 노드의 key보다 크거나 같은 완전 이진트리이다.
- 다른 규칙은 없다. 단지 부모노드가 자식 노드의 key보다 크만 하면 된다.
최대 힙의 삽입 과정
트리의 가장 끝 위치에 데이터를 삽입하고,
부모노드와 key값을 비교하여 클 경우 부모 노드와 자리를 교체하는 것을 반복한다.
최대 힙의 삭제 과정
- 힙은 삭제할 때 최상위 노드를 반환하며 삭제한다. 마치 Queue의 poll()와 같다.
최상위 노드를 삭제한 후 최상위 노드에 가장 마지막 위치의 노드를 위치시킨다.
그 후, 삽입과 반대의 과정으로 자식노드와 비교하며 자리를 교체한다.
(좌, 우 노드와 비교하여 더 큰 값과 자리를 교체한다.)
우선순위 큐(Priority Queue)
자바에서는 우선순위 큐(Priority Queue)라는 자료구조 라이브러리로 힙을 지원한다.
사실 힙을 지원한다기보다는, 우선순위 큐가 우선순위를 선정할 때 힙 방식으로 정렬한다는 게 맞다.
우선순위 큐는 Queue와 비슷하지만, 선입선출 구조인 Queue와 달리 Queue에 들어있는 자료 중 우선순위를 설정하여 우선순위가 높은 순서대로 poll() 하는 구조이다.
🔎 다익스트라 알고리즘이란?
그래프 최단 거리 구하는 알고리즘
1. 다익스트라(Dijkstra)
2. 벨만-포드(Bellman-Frod)
3. 플로이드-와샬(Floyd-Wrasahll)
다익스트라(Dijkstra) 알고리즘
- 그래프의 최단 경로 구하는 알고리즘
- 하나의 정점에서 출발하는 최단 거리를 구함(출발지만 정함)
- 음수 가중치 없어야 함
- 인접 행렬로 표현된 그래프의 경우 시간 복잡도 O(n^2)
- 우선순위 큐 사용하여 시간 복잡도 O(mlog n)까지 낮출 수 있음 → 개선된 다익스트라 알고리즘
- 탐욕법과 동적 계획법 사용
최단 거리 구하는 알고리즘에서 출발지 하나를 고르는 것은 벨만-포드와 같다. 다익스트라와 벨만-포드의 차이점은 아래와 같다.
다익스트라벨만-포드
| 음수 가중치 | X | O |
| 음수 사이클 | X | X |
| 시간복잡도 | O(mlog n) | O(mn) |
🔎 다익스트라 알고리즘 과정
1) 아직 방문하지 않은 정점 중 출발지로 부터 가장 거리가 짧은 정점을 방문한다.
2) 해당 정점을 거쳐 갈 수 있는 정점의 거리가 이전 기록한 값보다 적으면 갱신한다.
예시)
pq는 우선순위 큐로 정점과 출발지에서 정점까지 가는 최소 거리를 저장한다. 우선순위는 거리가 짧을수록 높다.
check는 boolean 배열로 해당 정점을 방문하는지 체크한다.
dist는 int 배열로 출발지에서 최소 거리를 기록한다.
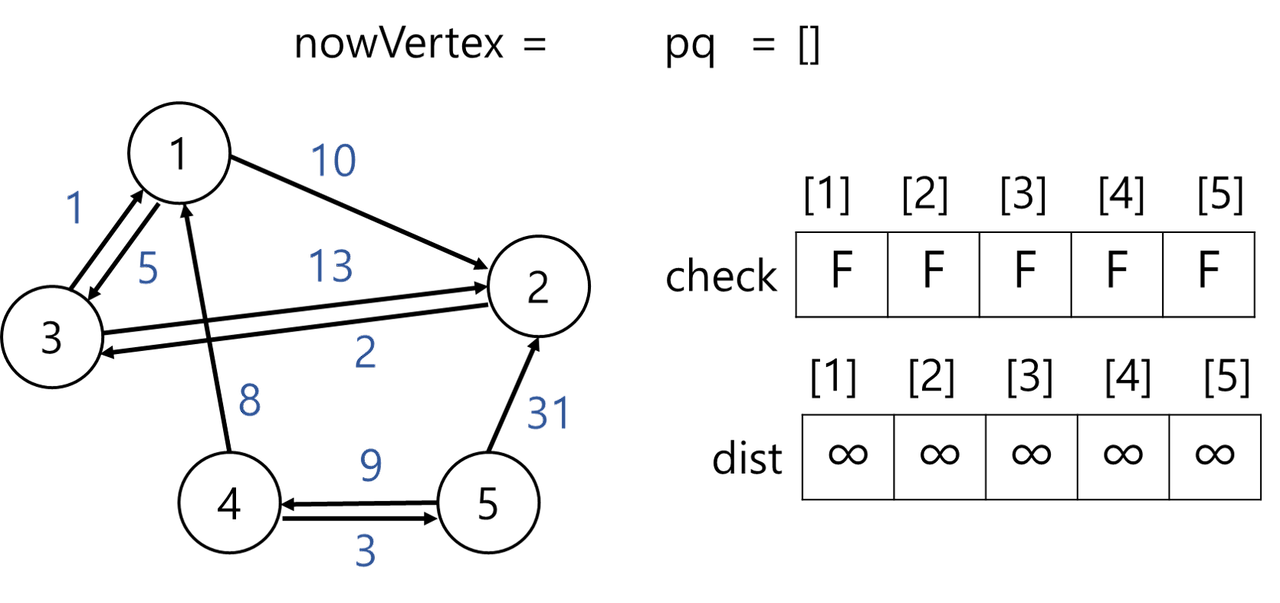
1) 출발지 4를 우선순위 큐에 넣는다. 출발지이므로 거리는 0이다.
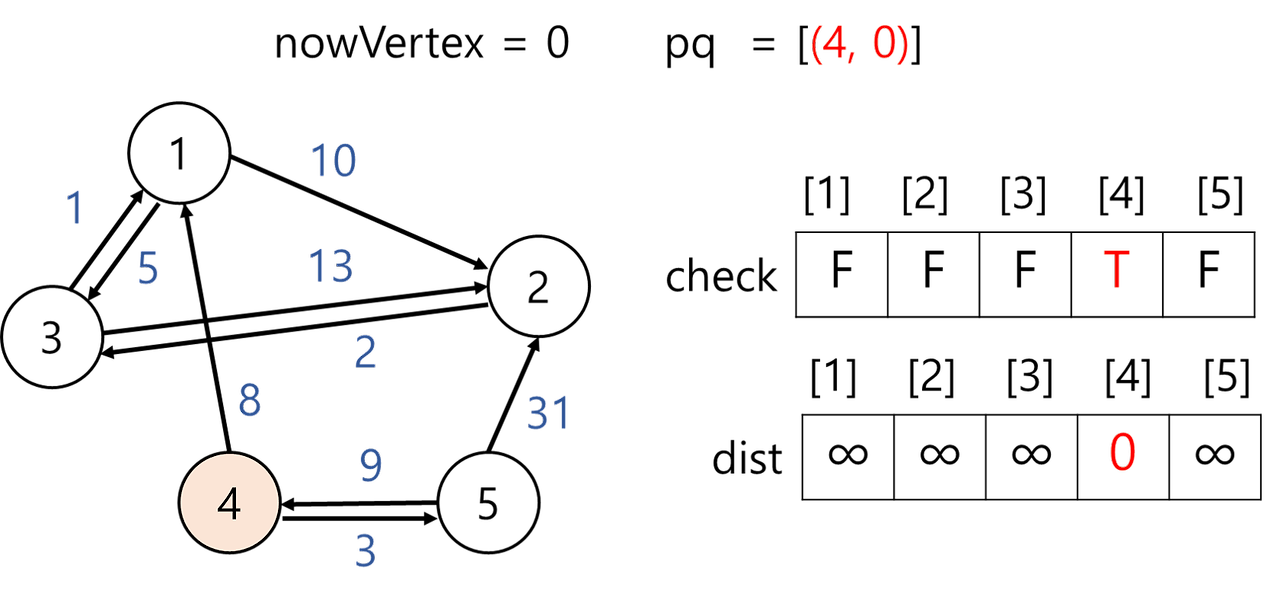
2) 우선순위 큐에서 하나 꺼내 nowVertex에 저장하고 방문체크를 한다. nowVertex을 거쳐 갈 수 있는 정점의 거리가 이전 기록한 값보다 적으면 갱신한다.
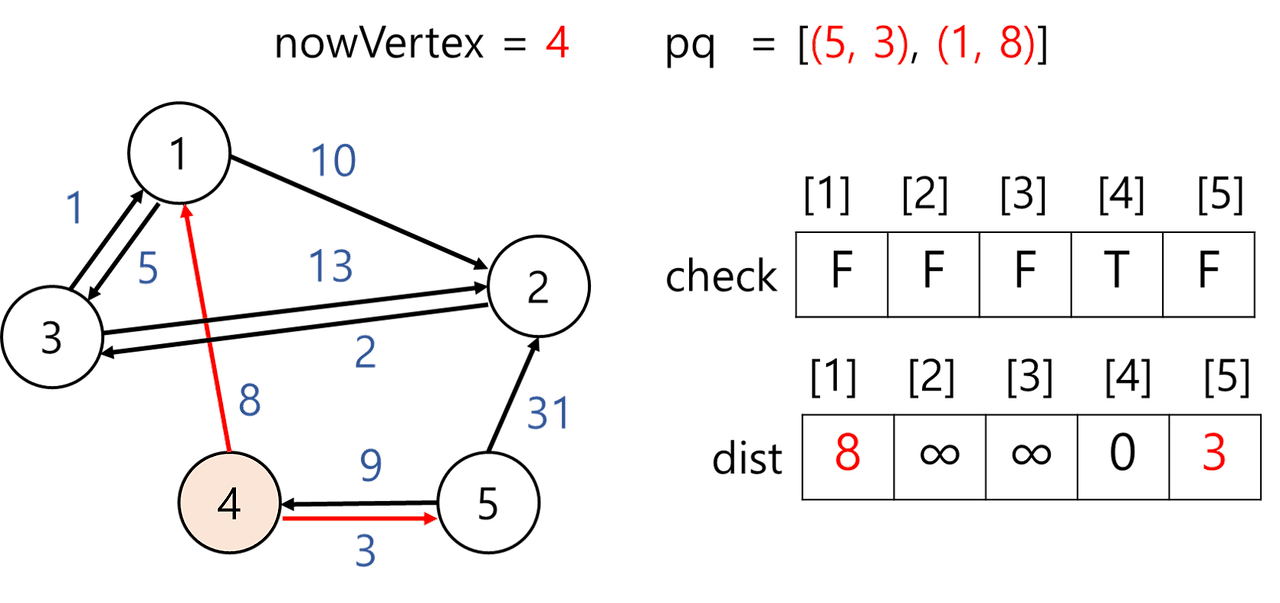
nowVertex는 4이다. 정점 4와 인접한 정점은 1과 5가 있다.
- dist[1] = 8로 변경
처음 정점은 출발지이다. 출발지에서 정점 1로 가는 거리는 8이므로 dist[1] 값을 갱신해준다. 우선순위 큐에 정점 1과 출발지에서 정점 1까지 가는 거리(=8)을 추가해준다.(1, 8) - dist[5] = 3로 변경
위와 동일한 이유로 값을 갱신하고 우선순위 큐에 값을 추가한다.(5, 3)
3) 우선순위 큐에 값이 있으므로 하나 꺼내 nowVertex에 저장하고 방문 처리한다.

nowVertex = 5이고 방문하지 않았으므로 방문 체크 후 인접 정점 살펴본다. 정점 5과 인접한 정점은 4와 2가 있다.
- dist[2] = 34로 값 변경
출발지에서 정점 2로 가는 값을 살펴준다. 이 때 경우는 2가지이다.
① 지금까지 계산한 출발지 ~ 정점 2 최단 거리 = dist[2]
② 출발지에서 정점 5를 지나서 정점 2를 가는 거리 = dist[5] + 정점 5에서 정점 2로 가는 거리(=간선의 가중치)
과 ②를 비교하여 더 작은 값을 dist[2]에 기록한다.
①과 ② 를 계산해보자.
① dist[2] = 무한
② dist[5] + 정점 5에서 정점 2로 가는 거리 = 3 + 31 = 34
① > ② 이므로 값을 갱신하고 우선순위 큐에 해당 정점을 추가한다.(2, 34) - dist[4] 값 변경 x
① dist[4] = 0이다.
② dist[5] + 정점 5에서 정점 4로 가는 거리 = 3+ 9 = 12이다.
① < ② 이므로 값 갱신하지 않는다.
4) 우선순위 큐에서 값을 꺼낸다.

nowVertex = 1이고 방문하지 않았으므로 방문 체크 후 인접 정점 살펴본다. 정점 1과 인접한 정점은 2와 3이 있다.
- dist[2] = 18로 값 변경
① dist[2] = 34
② dist[1] + 정점 1에서 정점 2로 가는 거리 = 8 + 10 = 18
① > ② 이므로 값을 갱신하고 우선순위 큐에 해당 정점을 추가한다.(2, 18) - dist[3] = 13로 값 변경
① dist[3] = 무한
② dist[1] + 정점 1에서 정점 3로 가는 거리 = 8 + 5 = 13
① > ② 이므로 값을 갱신하고 우선순위 큐에 해당 정점을 추가한다.(3, 13)
5) 우선순위 큐에서 값을 꺼낸다.
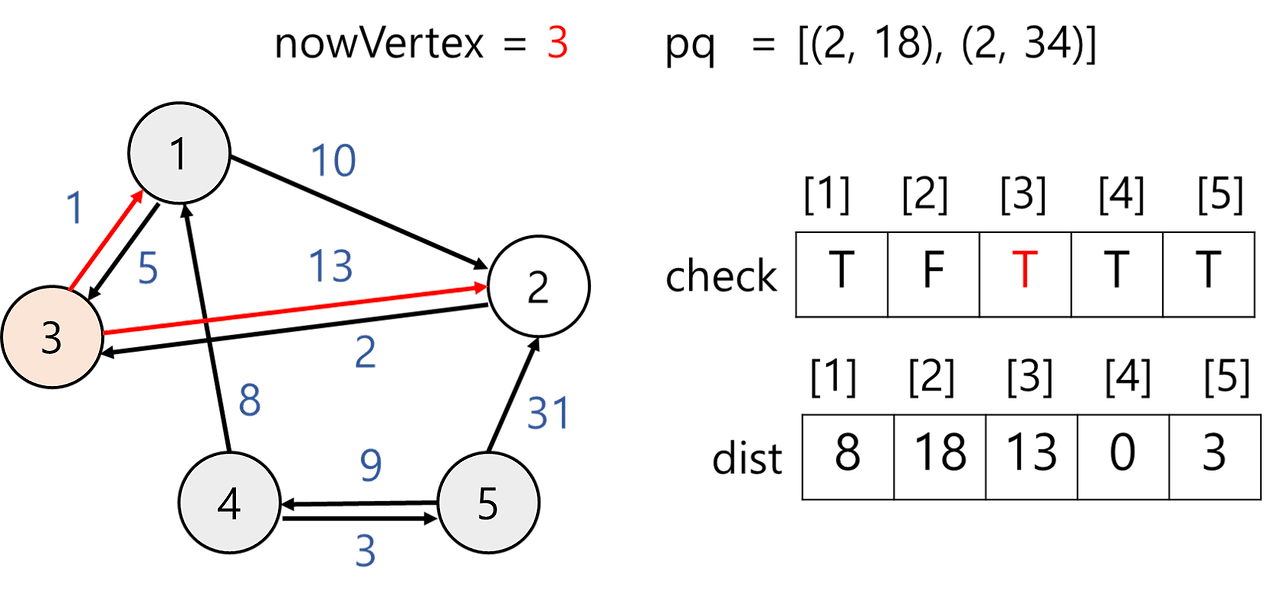
nowVertex = 3이고 방문하지 않았으므로 방문 체크 후 인접 정점 살펴본다. 정점 3과 인접한 정점은 1과 5가 있다.
- dist[1] 값 변경x
① dist[1] = 8
② dist[3] + 정점 3에서 정점 1로 가는 거리 = 13 + 1 = 14
① < ② 이므로 값을 갱신하지 않는다. - dist[2] 값 변경x
① dist[2] = 18
② dist[3] + 정점 3에서 정점 2로 가는 거리 = 13 + 13 = 26
① < ② 이므로 값을 갱신하지 않는다.
6) 우선순위 큐에서 값을 꺼낸다.
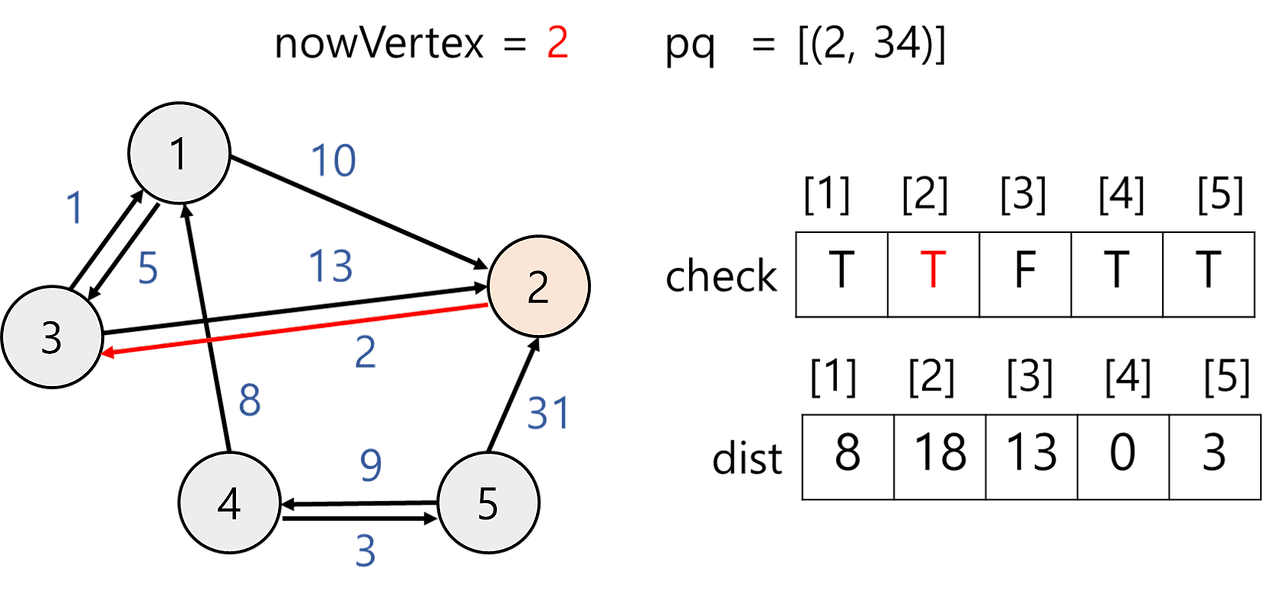
nowVertex = 2이고 방문하지 않았으므로 방문 체크 후 인접 정점 살펴본다. 정점 2과 인접한 정점은 3이다.
- dist[3] 값 변경x
① dist[3] = 13
② dist[2] + 정점 2에서 정점 3로 가는 거리 = 18 + 2 = 20
① < ② 이므로 값을 갱신하지 않는다.
7) 우선순위 큐에서 값을 꺼낸다.
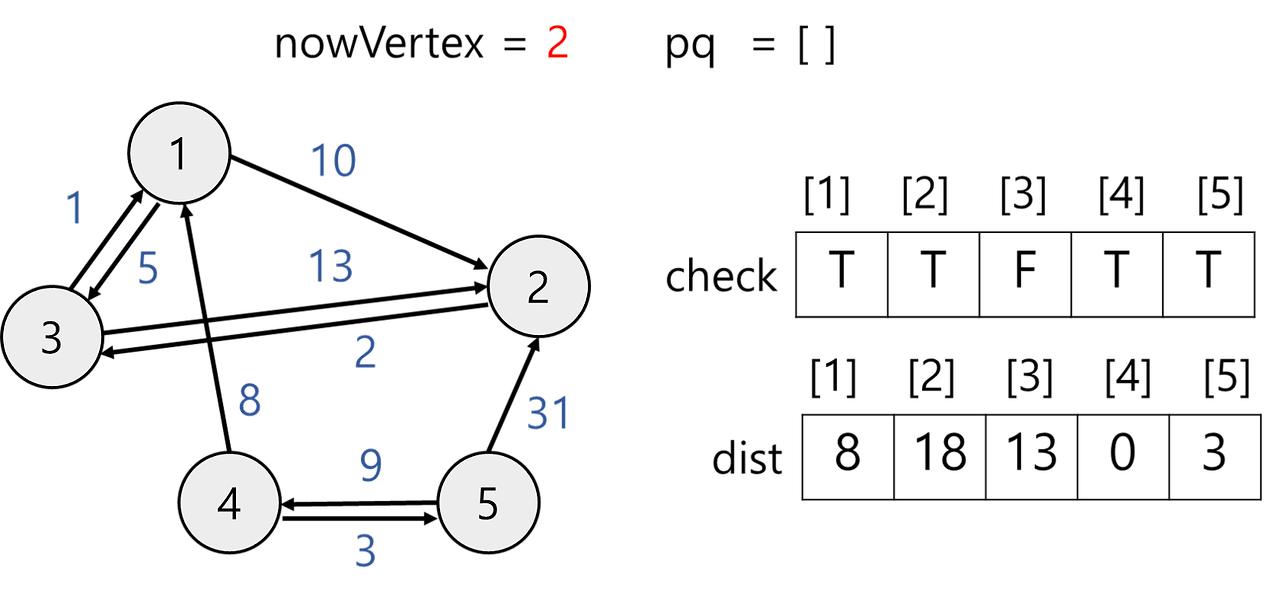
nowVertex = 2이고 방문했으므로 다음으로 넘어간다.
8) 우선순위 큐가 비었으므로 다익스트라 알고리즘을 종료한다. 정점 4에서 출발하여 다른 정점까지 최소 거리는 다음 dist 배열과 같다.

💻 다익스트라 알고리즘 구현 - Java
개선된 다익스트라 알고리즘 구현을 위해 인접 리스트 그래프 + 우선순위 큐를 사용하였다.
- Node 클래스를 만든다. 이 클래스는 우선순위 큐에 정점번호 + 가중치 저장을 위해 만드는 것이다.
class Node implements Comparable<Node>{
int index;
int cost;
//정점번호, 가중치 저장
public Node(int index, int cost) {
this.index = index;
this.cost = cost;
}
//cost(=가중치) 중심으로 우선순위가 정해지기 때문에 compareTo 오버라이딩
//다른 방법으로 이를 생략하고 우선순위 큐 아래처럼 선언
/**PriorityQueue<Node> pq = new PriorityQueue<Node>
((o1, o2) -> Integer.compare(o1.cost, o2.cost));
**/
@Override
public int compareTo(Node o) {
return Integer.compare(this.cost, o.cost);
}
}
- boolean check 배열과 int dist 배열을 만든다.
check 배열은 정점을 방문했는지 확인하고, dist 배열은 출발지로부터 거리가 얼마나 되는지 기록한다. dist 배열은 INF(무한대) 값으로 초기화한다.
boolean[] check = new boolean[n + 1];
int[] dist = new int[n + 1];
int INF = Integer.MAX_VALUE;
Arrays.fill(dist, INF);
- 출발지는 방문으로 표시하고 dist배열 해당 인덱스에 0으로 기록한다. 출발지 정점과 가중치를 우선순위 큐에 넣는다. 이때 우선순위는 가중치가 가장 작은 것이다.
dist[start] = 0;
PriorityQueue<Node> pq = new PriorityQueue<>();
pq.offer(new Node(start, 0));
- 큐가 빌 때 까지 다음을 반복한다.
1) 큐 앞에 있는 값을 가져오고 삭제한다. 이를 nowVertex로 하겠다. 이때 가져온 값은 현재 큐에 있는 값 중 출발지로부터 가장 가까운 거리(=작은 가중치)를 가졌다.
int nowVertex = pq.poll().index;2-1) 만약 nowVertex를 방문했다면 다시 1)로 돌아간다.
2-2) 만약 nowVertex를 방문하지 않았다면 방문 처리 후 3)을 수행한다.
3) nowVertex과 인접한 정점들을 살핀다. 이때 하나의 인접정점을 next로 하겠다.
① 지금까지 출발지에서 next로 갈 때 가장 빠른 거리
② 출발지에서 nowVertex 방문 후 next로 가는 거리
① < ② 라면 지금까지 계산한 출발지-next 거리보다 출발지-nowVertex-next 거리가 더 짧다는 뜻이므로 값을 갱신하고 next 정점과 ②값을 우선순위 큐에 넣어준다.
(출발지에서 갈 수 있는 정점이면 우선순위 큐에 넣어서 최단 거리를 계산해줘야 한다.)
//index의 연결된 정점 비교
for(Node next : graph[nowVertex]) {
if(dist[next.index] > dist[nowVertex]+ next.cost) {
dist[next.index] = dist[nowVertex] + next.cost; //값 갱신
pq.offer(new Node(next.index, dist[next.index]));
}
}
전체코드
class Node implements Comparable<Node>{
int index;
int cost;
public Node(int index, int cost) {
this.index = index;
this.cost = cost;
}
@Override
public int compareTo(Node o) {
return Integer.compare(this.cost, o.cost);
}
}
public class Main {
static ArrayList<Node>[] graph;
//노드의 크기, 출발지
public static void Dijkstra(int n, int start) {
boolean[] check = new boolean[n + 1];
int[] dist = new int[n + 1];
int INF = Integer.MAX_VALUE;
Arrays.fill(dist, INF);
dist[start] = 0;
PriorityQueue<Node> pq = new PriorityQueue<>();
pq.offer(new Node(start, 0));
while(!pq.isEmpty()) {
int nowVertex = pq.poll().index;
if(check[nowVertex]) continue;
check[nowVertex] = true;
//index의 연결된 정점 비교
for(Node next : graph[nowVertex]) {
if(dist[next.index] > dist[nowVertex]+ next.cost) {
dist[next.index] = dist[nowVertex] + next.cost;
pq.offer(new Node(next.index, dist[next.index]));
}
}
}
//최소거리 출력
for(int i : dist) {
if(i == INF) System.out.print(0 + " ");
else System.out.print(i+" ");
}
}
public static void main(String[] args) throws IOException {
//그래프 입력 받기
BufferedReader bf = new BufferedReader(new InputStreamReader(System.in));
//정점의 개수, 간선의 개수
int n = Integer.parseInt(bf.readLine());
int m = Integer.parseInt(bf.readLine());
graph = new ArrayList[n+1];
for (int i = 0; i <= n; i++) graph[i] = new ArrayList<>();
StringTokenizer st;
for(int i = 0 ; i < m; i++) {
st = new StringTokenizer(bf.readLine());
int v = Integer.parseInt(st.nextToken());
int w = Integer.parseInt(st.nextToken());
int cost = Integer.parseInt(st.nextToken());
graph[v].add(new Node(w, cost));
}
int start = Integer.parseInt(bf.readLine());
//다익스트라 알고리즘 수행
Dijkstra(n, start);
}
}입력
5
9
1 2 10
1 3 5
2 3 2
3 1 1
3 2 13
4 1 8
4 5 3
5 4 9
5 2 31
4
출력 결과
0 8 18 13 0 3 //인덱스 0은 사용 x